plane
Creates a new rectangular subset of a plane in ℝ³.
Syntax
-
plane([a[, f[, d[, α]]]])-
ais a three-dimensional real vector -
fis a three-dimensional real vector -
dis a three-dimensional real vector -
αis a real number
-
Description
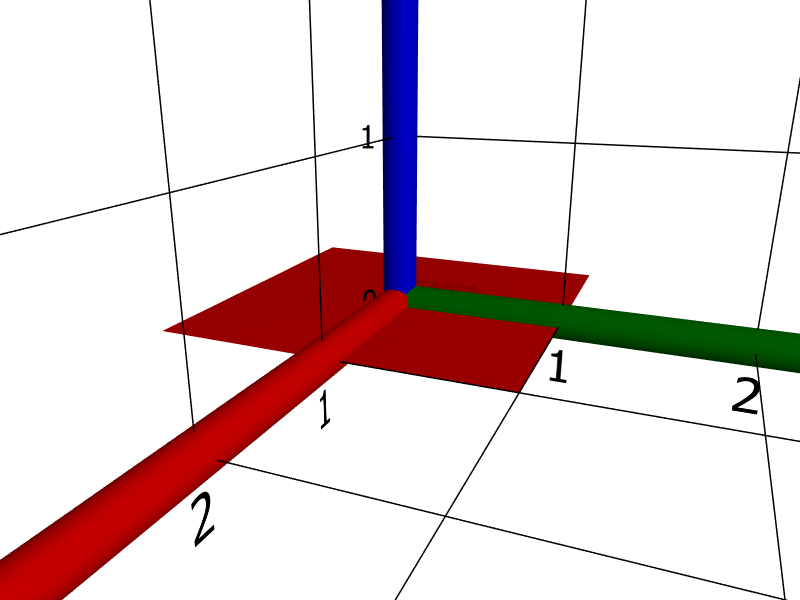
plane() creates the square [−1, 1]² × { 0 } ⊂ ℝ³.
plane(a, f, d, α) translates the square by a, scales it by diag(f), aligns its normal with d, and rotates it an amount α about its (normal) axis.
Since a plane is flat, the third component of f should be unity. Unless the two first components of f coincide, the resulting object will be a non-square rectangle.
Hence,
-
aspecifies the position of square’s centre of mass. -
f = (s, t, 1)specifies the half side lengthssandtof the rectangle. -
dspecifies the normal direction of the rectangle. -
αspecifies the rotation of the rectangle about its (normal) axis.
If omitted, a defaults to ❨0, 0, 0❩, f to ❨1, 1, 1❩, d to ❨0, 0, 1❩, and α to 0.
The object is shown in the current scene and a reference to the object is returned.
The AdjustVisual function can be used to adjust the appearance of the rectangle. See Visual settings for a list of applicable settings.
Examples
plane()